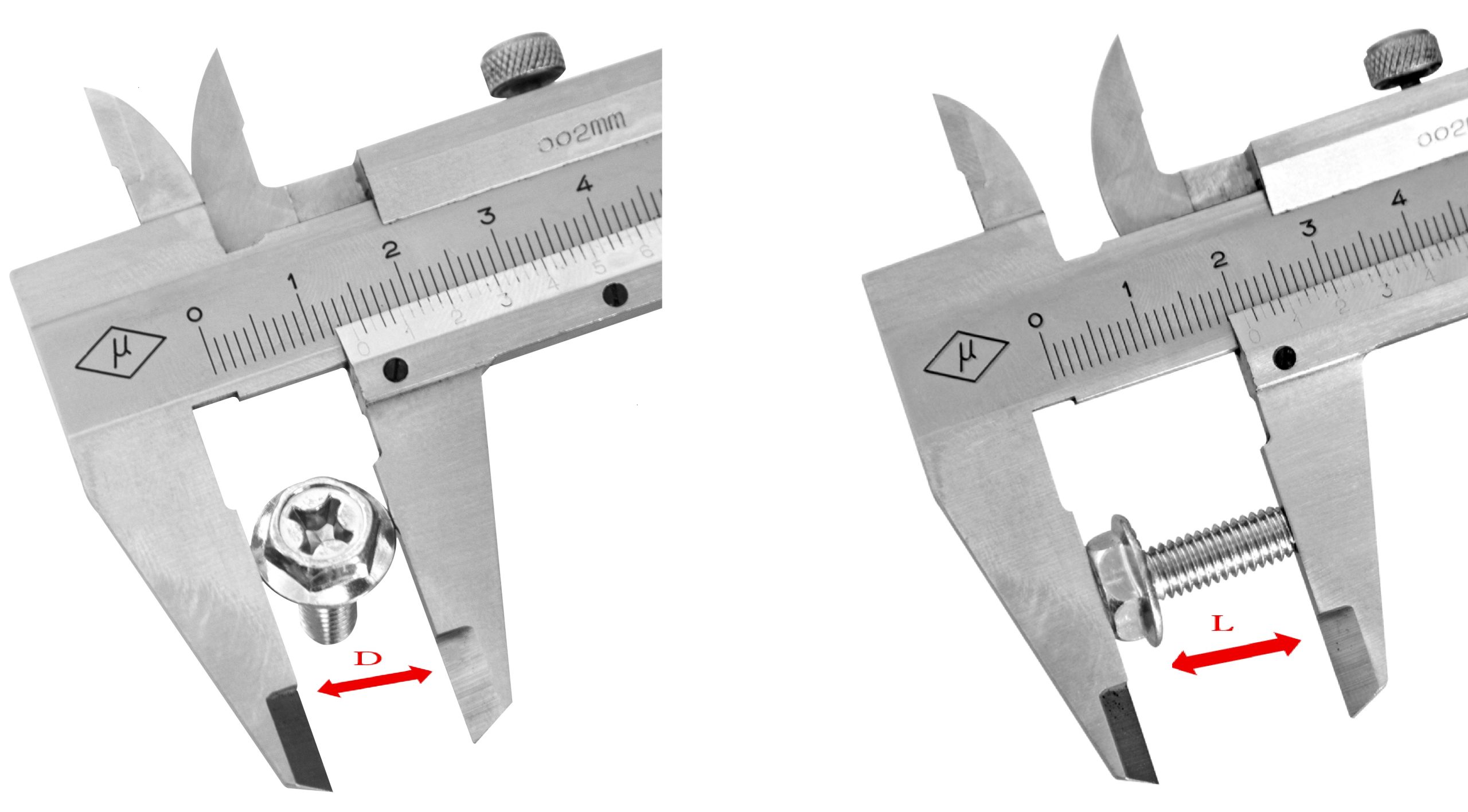
対応ボルト
- 長径比(L/D>1.5)であれば問題なく対応できます。
- 長径比≦1.5の場合は実物テストのうえ判断します。
- 長径比1.1のボルトまで対応可能です。
幅広い形状のヘッドに対応

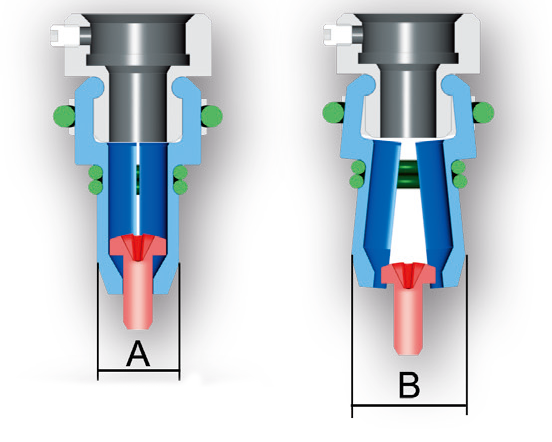
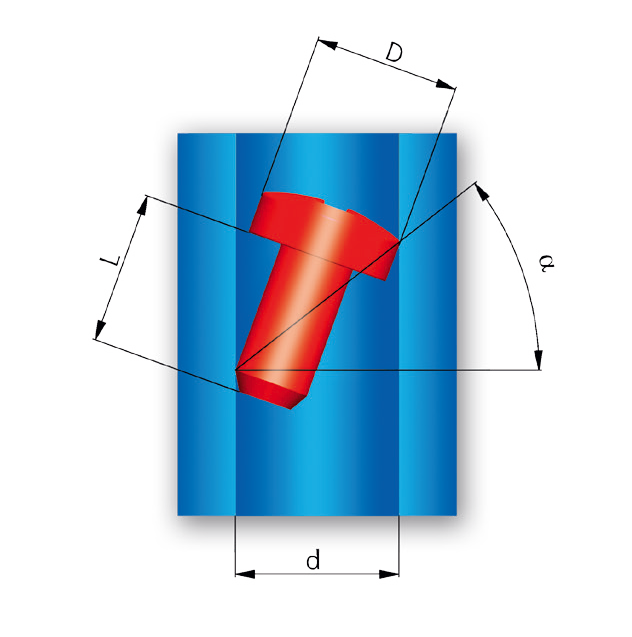
対応スリーブ
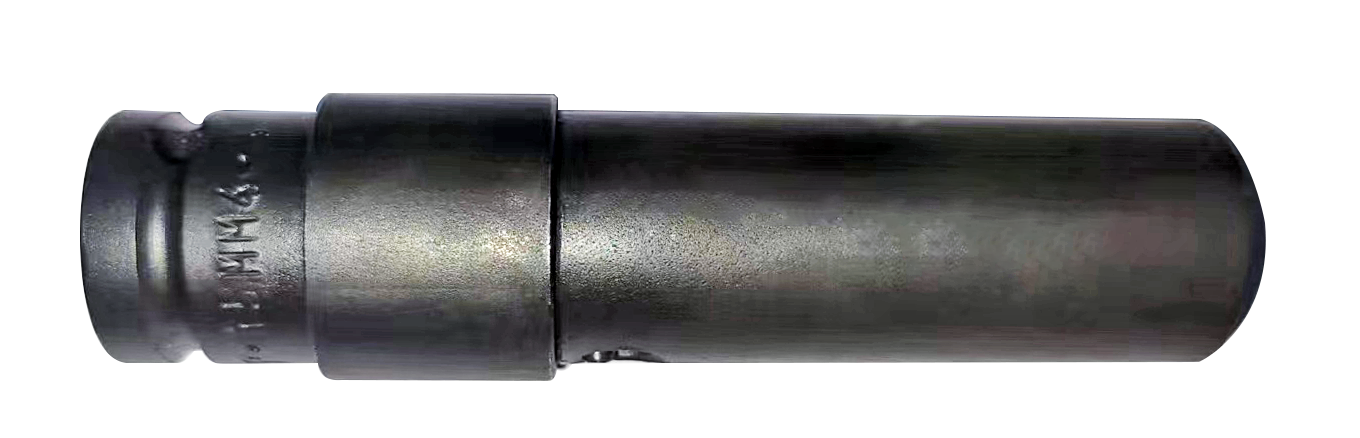
- ボルトと工程状況によりスリーブを制作します。
- 穴ずれ:+/-3mm
- 穴角度ずれ:+/-2.8°
- 長寿命
- モジュール化によりクイック交換とコストセーブを実現
精確な締め付けを実現するために、ファスナーに適合するドライバービットやソケットが必要です。

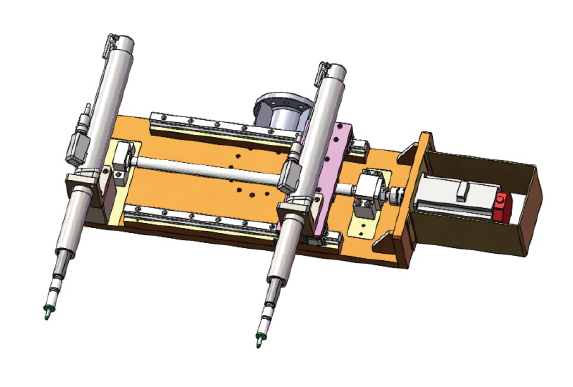
ボルト締付駆動ユニット
締付可変ピッチシステム
同じ生産ラインで複数の機種を同時生産の場合、各機種の締付位置が異なり、締付治具にサーボ可変ピッチを追加し、ロボットの外部軸制御により、2つの締付ガンの相対位置を調節する。


締付駆動ユニット

- トルク範囲:0.4Nm -350Nm;
- ボルト / ナット、スタッドボルト両方に対応
- モジュール化による省スペース
- コンパクト設計の端子台
- 精度の高いユニット制御によるボルト射出時間の短縮でタクトの最適化を実現
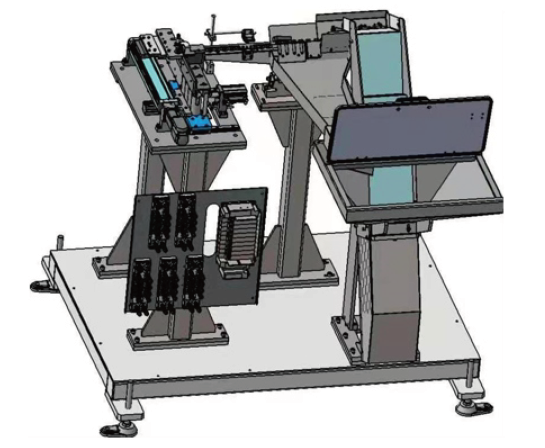
バキューム式フィーダー

- 使用可能な十字穴ボルトと外経は現物合わせで決定
- 精度の高い締付位置合わせ
- 深さ100mmまで対応可能
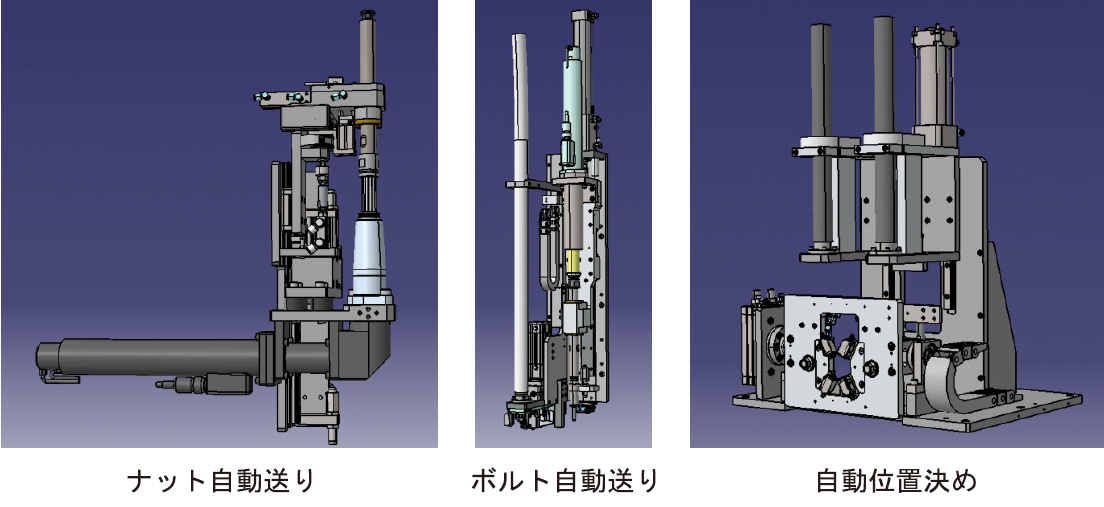
自動位置決めボルトフィーディングシステム

- ボルト/ナットもしくはスタッドボルトに対応
- モジュール化による省スペース
- 計量コンパクト設計の端子台
- 垂直/水平方向への柔軟で迅速な動き
- センサーによるボルトフィーディング監視
振動ユニット スクリュー式


- 規格M2.5-M8ボルトとM4-M16ナットに適用する
- 長さ50mm以内
- ボルト詰まり防止:セパレーターによりボルト槽のボルト引っかかり制御
- ボルトマッチング性を保証:振動ユニットの客先要求毎のカスタマイズ
- ガイド槽は高硬度(HRC50)を持ち、長寿命を担保
- 低振動・低騒音
- モジュール化により容易なメンテナンス
- ボルトは圧縮エアで搬送
- ボルト送り合格率は99.98%
振動ユニット ステッピング式
- 規格M4-M16
- 長さ20-50mmのボルトに対応
- 最大60本/分のスピード供給
- ボルト詰まり防止:セパレーターによりボルト槽のボルト引っかかり制御
- モジュール化により容易なメンテナンス
- 最大で10箇所に同時にボルトを送れる
- ボルトは圧縮エアで搬送
- ボルト送り合格率は99.98%
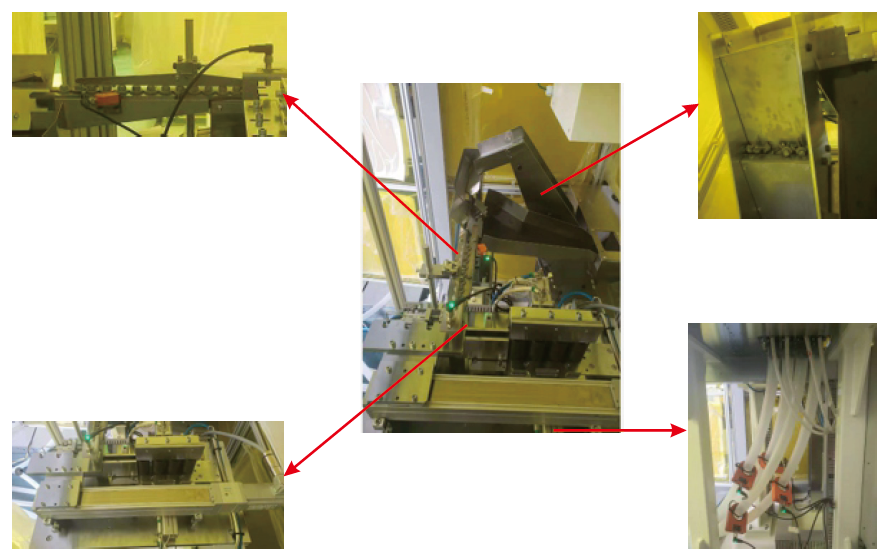
ドアヒンジ締結ボルトオートフィーディングシステム
【プロジェクト説明】
- 部位:四ドア車のドアヒンジ締結
- ボルト規格と数:M8/24mm/六角ワッシャ付きボルト(片側8個締付)
- ピッチ要求:58JPH
- 片側固定軸数:1セット締付ロボットにアクチェエーター2セット(軸中心距離は変える)
- データ収集:締付トルクを収集して工場のサーバーにアップロード
- スリーブ:特殊自動適応マグネットスリーブを採用(+/-3mmの位置ずれと+/-2.8°の角度ずれを満たす)
【具体的プロセス】
- ボルト振動盤から同時に2個ボルトを搬出
- チューブ搬送し、締付ヘッド部に設置
- 2箇所(上下1個ずつ)を同時に固定

Aピラー補強板締結ボルトオートフィーディングシステム
【プロジェクト説明】
- 部位:Aピラー補強板の締結
- ボルト規格と数:M12/35mm/六角フランジボルト(片側に16個締付)
- ピッチ要求:65JPH
- 片側固定軸数:2セットロボットと2セットアクチェエーター(軸中心距離は変える)
- データ収集:締付トルクを収集して工場のサーバーにアップロード
- スリーブ:特殊自動適応マグネットスリーブを採用(+/-3mmの位置ずれと+/-2.8°の角度ずれを満たす)
【具体的プロセス】
- ボルト振動盤から同時に4個ボルトを搬出
- チューブ搬送し、ボルト設置台に設置
- マグネットスリーブをつけたロボットがピックアップ
- 締結
フロアパネル ボルトオートフィーディングシステム
【プロジェクト説明】
- 部位:Aピラー補強板も締結
- ボルト規格と数:M10/45mm/六角ワッシャ付きボルト(片側7個固定)
- ピッチ要求:58JPH
- 片側固定軸数:1セットロボットと2セットアクチェエーター(軸中心距離は変える)
- データ収集:締付トルクを収集して工場のサーバーにアップロード
- スリーブ:特殊自動適応マグネットスリーブを採用(+/-3mmの位置ずれと+/-2.8°の角度ずれを満たす)
【具体的プロセス】
- ボルト振動盤から同時に4個ボルトを搬出
- チューブ搬送し、締結ヘッド部に設置
- 2箇所(上下1個ずつ)を同時に固定

リアドアヒンジ締結ナットオートフィーディングシステム
【プロジェクト説明】
- 部位:リアドアヒンジナット
- ボルト規格と数:M8ワッシャ付きナット 4個/M10ワッシャ付きナット 2個
- ピッチ要求:65JPH
- 仕様:車種要求によりM8ナットもしくはM10ナットを搬送
- データ収集:仮締め工程なのでなし
【具体的プロセス】
- 車種により締結ナットサイズに合わせ締付工具切替
- ナットを車種によって必要個数を台上に搬送
- ロボットがピックアップ
- 締付